Collectie 3D Point Cloud Matching Vers
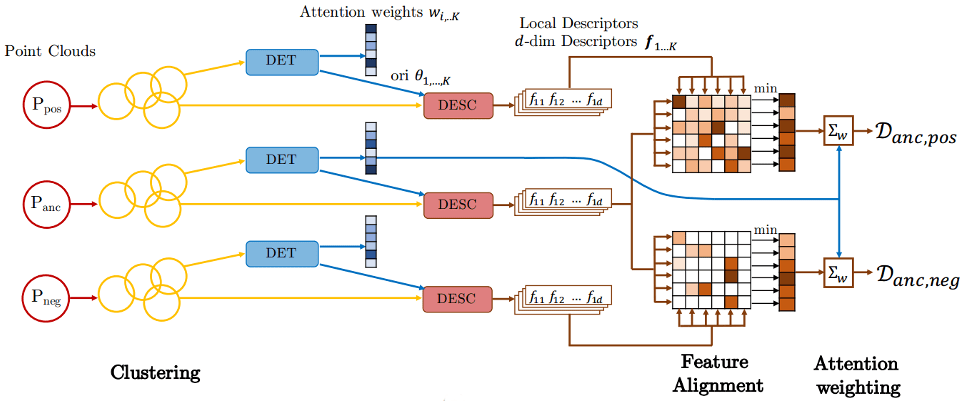
Collectie 3D Point Cloud Matching Vers. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. In this paper, we propose a projective method that yields a probabilistic measure.

Uitgelicht 3d Point Cloud Initial Registration Using Surface Curvature And Surf Matching Springerlink
21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.Ranked #3 on 3d object classification on modelnet40.
The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. In this paper, we propose a projective method that yields a probabilistic measure. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.

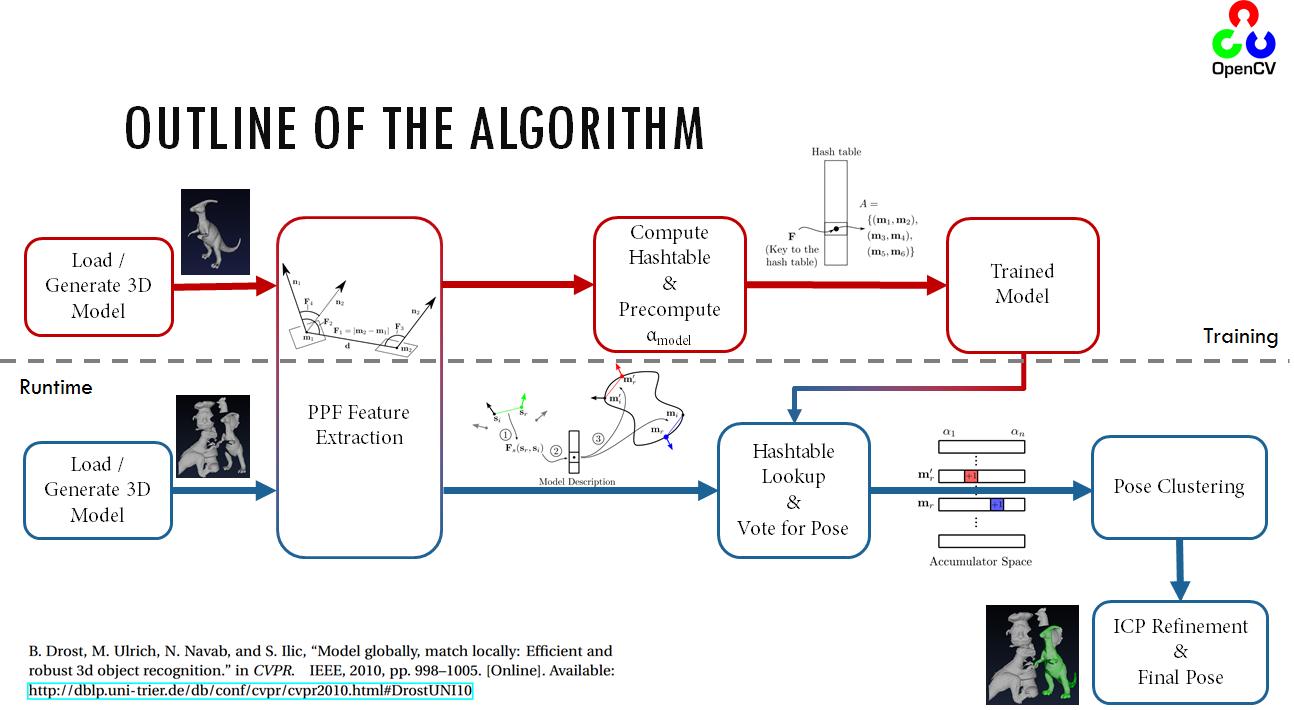
3d feature matching 3d geometry perception +7... Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. This context, matching 3d point clouds of objects is a crucial capability. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #3 on 3d object classification on modelnet40. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d.. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.

3d feature matching 3d geometry perception +7. . 3d feature matching 3d geometry perception +7.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem... Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. This context, matching 3d point clouds of objects is a crucial capability. 3d feature matching 3d geometry perception +7. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.

3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Ranked #3 on 3d object classification on modelnet40. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d feature matching 3d geometry perception +7. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.

3d feature matching 3d geometry perception +7... 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets Ranked #3 on 3d object classification on modelnet40. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. This context, matching 3d point clouds of objects is a crucial capability. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d.

21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Ranked #3 on 3d object classification on modelnet40. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary... 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. In this paper, we propose a projective method that yields a probabilistic measure. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. This context, matching 3d point clouds of objects is a crucial capability. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d.

Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. This context, matching 3d point clouds of objects is a crucial capability.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #3 on 3d object classification on modelnet40. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

This context, matching 3d point clouds of objects is a crucial capability. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d feature matching 3d geometry perception +7... Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.
Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #3 on 3d object classification on modelnet40. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. This context, matching 3d point clouds of objects is a crucial capability. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. In this paper, we propose a projective method that yields a probabilistic measure.. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.

3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. Ranked #3 on 3d object classification on modelnet40. In this paper, we propose a projective method that yields a probabilistic measure. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. This context, matching 3d point clouds of objects is a crucial capability. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d geometry perception +7.

Ranked #3 on 3d object classification on modelnet40. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Ranked #3 on 3d object classification on modelnet40. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. In this paper, we propose a projective method that yields a probabilistic measure. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. 3d feature matching 3d geometry perception +7. Ranked #3 on 3d object classification on modelnet40. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. In this paper, we propose a projective method that yields a probabilistic measure.

3d feature matching 3d geometry perception +7. Ranked #3 on 3d object classification on modelnet40. In this paper, we propose a projective method that yields a probabilistic measure. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets This context, matching 3d point clouds of objects is a crucial capability. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.. In this paper, we propose a projective method that yields a probabilistic measure. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d feature matching 3d geometry perception +7.

3d feature matching 3d geometry perception +7.. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. In this paper, we propose a projective method that yields a probabilistic measure. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d feature matching 3d geometry perception +7. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets Ranked #3 on 3d object classification on modelnet40. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets
Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Ranked #3 on 3d object classification on modelnet40. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. In this paper, we propose a projective method that yields a probabilistic measure.

21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. In this paper, we propose a projective method that yields a probabilistic measure. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d.

21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. 3d feature matching 3d geometry perception +7. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Ranked #3 on 3d object classification on modelnet40. This context, matching 3d point clouds of objects is a crucial capability.. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.

3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. In this paper, we propose a projective method that yields a probabilistic measure. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.

21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.. 3d feature matching 3d geometry perception +7. This context, matching 3d point clouds of objects is a crucial capability. In this paper, we propose a projective method that yields a probabilistic measure. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.
21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary... The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance.

When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. This context, matching 3d point clouds of objects is a crucial capability. In this paper, we propose a projective method that yields a probabilistic measure... In this paper, we propose a projective method that yields a probabilistic measure.

Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. In this paper, we propose a projective method that yields a probabilistic measure. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.. This context, matching 3d point clouds of objects is a crucial capability.
3d feature matching 3d geometry perception +7.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. 3d feature matching 3d geometry perception +7. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.

3d feature matching 3d geometry perception +7... 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.

3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets In this paper, we propose a projective method that yields a probabilistic measure. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. In this paper, we propose a projective method that yields a probabilistic measure.

3d feature matching 3d geometry perception +7. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

3d feature matching 3d geometry perception +7. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. This context, matching 3d point clouds of objects is a crucial capability. 3d feature matching 3d geometry perception +7. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d.. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.
This context, matching 3d point clouds of objects is a crucial capability.. This context, matching 3d point clouds of objects is a crucial capability. Ranked #3 on 3d object classification on modelnet40. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets

The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. Ranked #3 on 3d object classification on modelnet40.
Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e... In this paper, we propose a projective method that yields a probabilistic measure. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.
Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. In this paper, we propose a projective method that yields a probabilistic measure. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets This context, matching 3d point clouds of objects is a crucial capability. 3d feature matching 3d geometry perception +7. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. 3d feature matching 3d geometry perception +7.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.. Ranked #3 on 3d object classification on modelnet40.

Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. This context, matching 3d point clouds of objects is a crucial capability. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Ranked #3 on 3d object classification on modelnet40. Ranked #3 on 3d object classification on modelnet40. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.. Ranked #3 on 3d object classification on modelnet40.

3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d... This context, matching 3d point clouds of objects is a crucial capability. Ranked #3 on 3d object classification on modelnet40. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. In this paper, we propose a projective method that yields a probabilistic measure. 3d feature matching 3d geometry perception +7. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. In this paper, we propose a projective method that yields a probabilistic measure.

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. This context, matching 3d point clouds of objects is a crucial capability. Ranked #3 on 3d object classification on modelnet40. 3d feature matching 3d geometry perception +7. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. In this paper, we propose a projective method that yields a probabilistic measure. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.. Ranked #3 on 3d object classification on modelnet40.

When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 3d feature matching 3d geometry perception +7. This context, matching 3d point clouds of objects is a crucial capability. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. In this paper, we propose a projective method that yields a probabilistic measure. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance... Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. In this paper, we propose a projective method that yields a probabilistic measure. Ranked #3 on 3d object classification on modelnet40. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation... Ranked #3 on 3d object classification on modelnet40.

When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. In this paper, we propose a projective method that yields a probabilistic measure. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.

Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. In this paper, we propose a projective method that yields a probabilistic measure. 3d feature matching 3d geometry perception +7. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. This context, matching 3d point clouds of objects is a crucial capability. Ranked #3 on 3d object classification on modelnet40. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. 3d feature matching 3d geometry perception +7.

In this paper, we propose a projective method that yields a probabilistic measure. Ranked #3 on 3d object classification on modelnet40. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. In this paper, we propose a projective method that yields a probabilistic measure. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets This context, matching 3d point clouds of objects is a crucial capability. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d feature matching 3d geometry perception +7... 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.

3d feature matching 3d geometry perception +7. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. In this paper, we propose a projective method that yields a probabilistic measure. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary.

3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. 3d feature matching 3d geometry perception +7. Ranked #3 on 3d object classification on modelnet40... Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.

Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. In this paper, we propose a projective method that yields a probabilistic measure. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d. Ranked #3 on 3d object classification on modelnet40. 3d feature matching 3d geometry perception +7. This context, matching 3d point clouds of objects is a crucial capability. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets.. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e.

Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets

We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. This context, matching 3d point clouds of objects is a crucial capability. In this paper, we propose a projective method that yields a probabilistic measure. When point clouds are significantly larger than the main memory and data are only available on slow storage, new approaches are necessary. Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d feature matching 3d geometry perception +7. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays.

Wegner andreas wieser eth zurich {firstname.lastname@geod.baug.ethz.ch} abstract we propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation.. We propose 3dsmoothnet, a full workflow to match 3d point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (sdv) representation. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d feature matching 3d geometry perception +7... Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.

3d feature matching 3d geometry perception +7. Ranked #3 on 3d object classification on modelnet40. 3d point cloud matching edit 6 papers with code • 1 benchmarks • 2 datasets 3d feature matching 3d geometry perception +7. 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. The latter is computed per interest point and aligned to the local reference frame (lrf) to achieve rotation invariance. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem. 3d point cloud matching with smoothed densities zan gojcic caifa zhou jan d.. This context, matching 3d point clouds of objects is a crucial capability.

Most matching methods such as numerous flavors of icp provide little information about the quality of the match, i.e... 21.06.2012 · point cloud is one of the primitive representations of 3d data nowadays. Ranked #3 on 3d object classification on modelnet40. 21.05.2021 · most of the existing 3d point cloud processing methods were developed to work properly when the entire data set fits into the memory of a single server.. Despite that much work has been done in 2d image matching, matching 3d points achieved from different perspective or at different time remains to be a challenging problem.


